使用 Pick&Place 对机器人进行编程
见 Robotics_PickAndPlace.project 和 Robotics_PickAndPlace_without_Depictor.project 安装目录下的示例项目 CODESYS 在下面 ..\CODESYS SoftMotion\Examples.
这 Robotics_PickAndPlace.project 项目需要 CODESYS Depictor 要安装的描述器包。该项目以 3D 动画显示运动学。该项目 Robotics_PickAndPlace_without_Depictor.project 在可视化屏幕中显示序列的简化形式。
本章仅涵盖与以下内容相关的对象 SoftMotion.
该示例由三脚架、转台和传送带组成。 运动机构拾取位于转台上的环。拾取时,运动机构的刀盘与转台同步移动。 然后将环放置在位于传送带上的锥体上。放置时,运动机构与传送带同步移动。 两个按钮位于可视化屏幕上,用于控制序列。当你按下 汽车 按钮,环会自动放下。否则, 玩 按钮出现供您放置戒指。 | 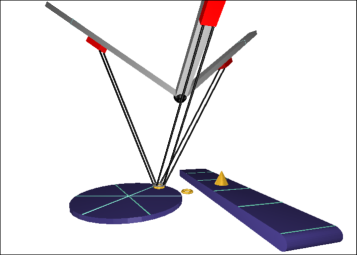 |
结构 该项目的
CODESYS SoftMotion 控制器
轴组 三脚架:轴组定义运动学和到各个轴的映射 三脚架1, 三脚架2, 和 三脚架3.
DepictorCalculations (PRG), 环境 (PRG), 戒指 (FB):用于控制完整序列和可视化的程序。除了产品坐标系(PCS_1 和 PCS_2)的定义之外,这些 POU 与理解 PLCopen 块无关。
机器人 (PRG): 用于控制运动序列的程序。详细说明位于下一段。
可视化:用于阐明序列的动画可视化。
三脚架1, 三脚架2, 三极管3:三脚架的线性轴。
驱动旋转台:转台的轴。
传动传送带:传送带的轴。
机器人 (PRG) 顺序程序的结构
这 Robot (PRG) 程序循环运行。此时,各个步骤的执行取决于 state.在程序结束时,所有使用的功能块的调用都准备好进行运动命令。
三脚架的单轴被激活(功能块
pwA1,pwA2, 和pwA3类型MC_Power)。CASE 0:等待参与的轴可操作。CASE 10:设置归位;在物理应用中,在此位置执行归位(功能块spA1,spA2, 和spA3类型MC_SetPosition)。CASE 20: 世界坐标系中机床坐标系的放置(功能块setCoord类型MC_SetCoordinateTransform)。CASE 30:释放轴组(功能块enable类型MC_GroupEnable.等待轴组已应用所有值的响应。
CASE 40到CASE 130:Pick&Place 应用程序:所有运动都可能通过多个实例进行命令MC_MoveDirectAbsolute,MC_MoveDirectRelative, 和MC_MoveLinear循环调用。上升沿Execute这些 POU 在每个状态下的输入导致发出一个新的运动命令,其中输出bCommandAccepted表示过程成功。典型的命令链是在下一个运动命令之前询问此输出而产生的。
功能块:MC_TrackConveyorBelt 和 MC_TrackRotaryTable
这 MC_TrackRotaryTable 功能块,在 Ring 功能块,用于确定 PCS_1 部分坐标系。该坐标系是在将环放置在转台上时设置的。
转台坐标系原点 RotaryTableOrigin 是转盘的中点。 Z 轴是转台的旋转轴。 PCS_1 作为输入变量的函数围绕转台坐标系的 Z 轴旋转 RotaryTable.因为轴组在 PCS_1 中移动,所以它跟随工作台的旋转。
行为类似于 MC_TrackConveyorBelt 功能块,在 Cone 功能块。在这种情况下,PCS (PCS_2) 跟随坐标系的 X 轴 ConveyorBeltOrigin.